新版本已发布:自动驾驶系统软件Mathworks RoadRunner R2025a 安装教程
RoadRunner R2024a 是领先的自动驾驶模拟的 3D 场景解决方案!通过该交互式编辑器来设计您需要的3D场景,您可以创建符合标准的区域的道路标志和标记并快速构建真实自然的道路场景。软件功能强大,支持激光雷达点云、航拍图像和GIS数据的可视化,完善每个阶段的细节和调整到最佳,从而能够进行准确的驾驶模拟。

允许通过简单的点击来插入标志、信号、护栏和道路损坏,也可以添加各种植被、建筑物和其他 3D 模型。也可以根据实际情况来自由设置和配置交叉路口的交通信号灯时间、相位和车辆路径。

目录
Mathworks RoadRunner 功能特点
道路和三维场景建模
使用 RoadRunner 创建逼真、复杂、相互连接的道路网络,包含交叉路口、桥梁、环岛、岔道和道路标记。
道路建模
通过指定曲率、垂直坡度和混合要素(包括横截面、坡度和凸度)来创建道路形状。
复杂交叉路口
设计包含并线、分离和环岛的复杂交叉路口。
道路和路面标记
添加带有车道标记、喷标和自定义图形的细节化路面。
预置和可自定义的素材和标志
使用 RoadRunner Asset Library 中的三维模型库构建 RoadRunner 场景。创建和放置可自定义的区域特定道路标志、路障、标志、桥墩、路灯和其他道路设施。
RoadRunner Asset Library
利用预置素材库提供的数百个模型,包括道路和公路标志、交通信号、路面标记、树木、路障和道路纹理,如裂缝和漏油。
Mathworks RoadRunner R2024a 安装教程
安装参照 Mathworks RoadRunner R2023a 即可
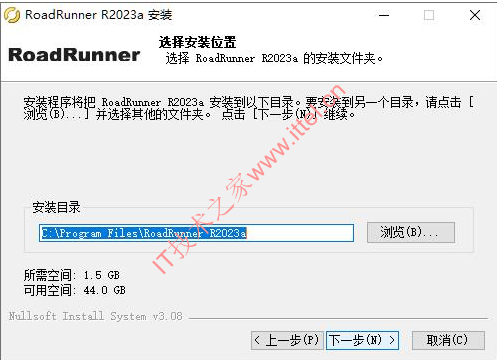
1、运行RoadRunner_R2023a_Update_1_win64.exe
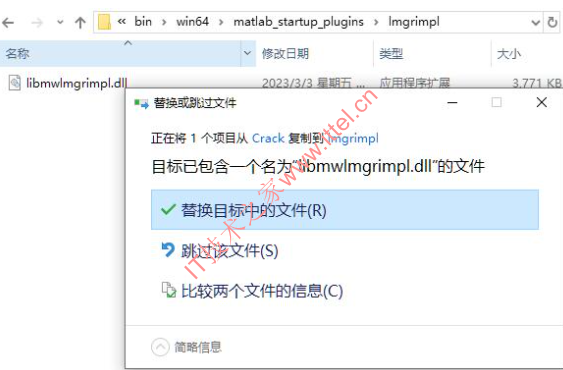
2、安装完成后,复制tercel文件夹下的libmwlmgrimpl.dll到安装目录并替换,默认:C:\Program Files\RoadRunner R2023a\bin\win64\matlab_startup_plugins\lmgrimpl
4、激活成功,哎就很棒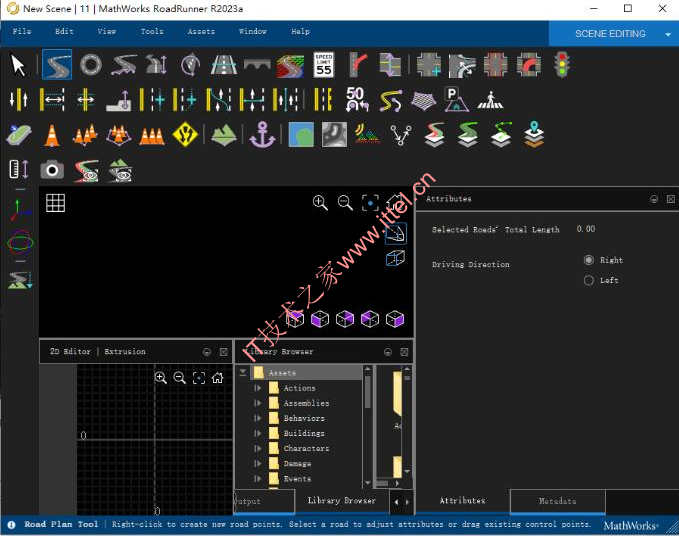
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

安装完成就可以侠盗飞车了吗
自动驾驶模拟